PAシリーズ 選定ガイド
自社の現場に最適なロボットと構成を見つけるためのガイドです。
最適な機種を選ぶ3つの基準
PAシリーズの選定は、以下の3つの要素を順番に確認していくことで、現場に最も適した構成を導き出すことができます。
搬送物の「重量」
運ぶ製品(段ボールやケース)の最大重量と、ロボットのハンド(アタッチメント)の重量を足した総重量から、20kg / 40kg / 50kg のベースとなる機種を決定します。
設置「スペース」
パレットを置くスペースや天井の高さを確認します。PAシリーズは「直交型」のため、多関節ロボットのように周囲の安全柵を広くとる必要がなく、既存の狭小レイアウトにそのまま組み込めます。
箱の「形状・材質」
製品の材質(段ボール、発泡スチロール、袋など)や、天面の状態(テープの有無、凹凸)に合わせて、最適なハンド(吸着・クランプ等)を選定します。
お悩み・現場環境からの選び方
「30kgの重労働で腰痛が限界。他社には狭くて断られた」
1箱30kgの重量物搬送により作業者の身体的負担が大きく、人材確保も困難な現場。さらに天井が低くスペースも限られており、多関節ロボットの導入が不可能な環境。

PA-50LC
低天井・狭小現場に収まる重量物対応機
「複雑な配置条件をクリアし、複数パレットへ同時に振り分けたい」
特殊サイズのパレットや製品ごとに異なる箱の向きなど、複雑な条件での高効率な積み替えが求められる現場。さらに、前後工程の他設備と連携したシステム構築を短納期で完遂する必要がある。

PA-40
複数パレット・箱の向き変更に対応する汎用機
「過酷な氷詰め作業で腰痛が課題。特殊な箱を確実に運びたい」
出荷重量が10kgに達する作業で、作業員の身体的負荷や人材確保が深刻な課題。側面に凹凸がある発泡スチロール箱など、一般的なロボットでは把持が難しい特殊な箱を、複雑なレイアウトを避けて一直線上に自動搬送したい。
PA-40
特殊箱の吸着と一直線配置を叶える強力機
搬送物に合わせたハンドの選び方
パレタイジングロボットの成功の鍵は「ハンド」にあります。YUSHINでは、対象物の特性に合わせた専用ハンドをご提案します。

● 吸着方式
上面が平らな段ボールや定形物で比較的サイズの大小が限定されるときに最適
● クランプ方式
上面を触れない対象物や封函されていないカートンケースなど
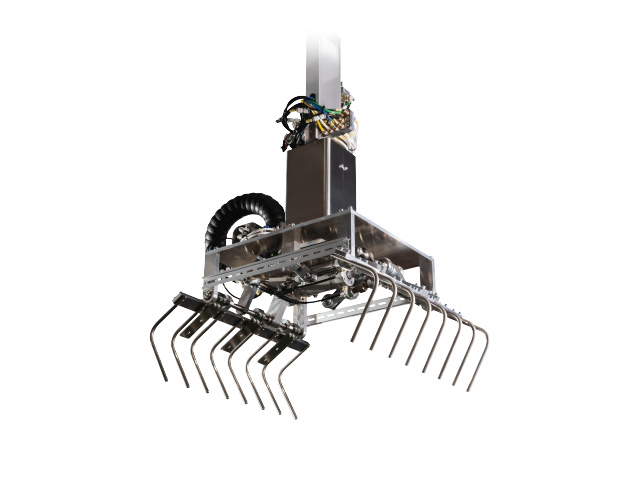
● フォーククランプ方式
主にクラフト袋などの不定形が対象

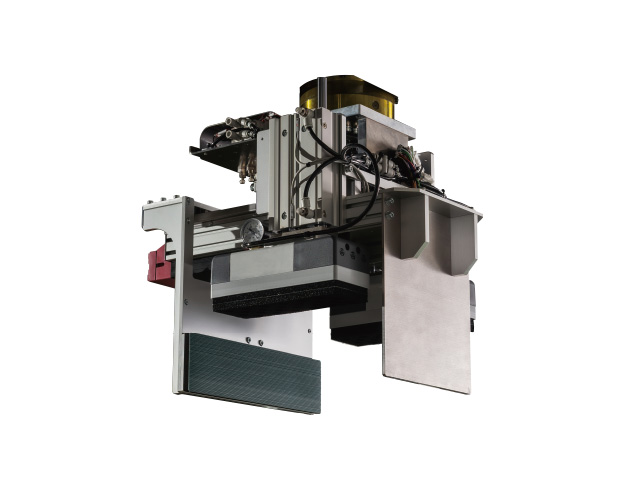
● 全面吸着方式
上面が平らでカートンサイズが大小さまざまなケース
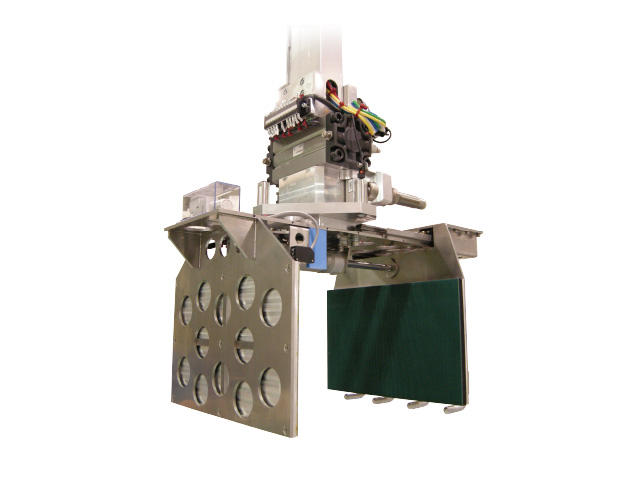
● 吸着クランプ方式
上面吸着で搬送しますが、重量物の場合に落下防止のサポートとして同時に両側をクランプします。
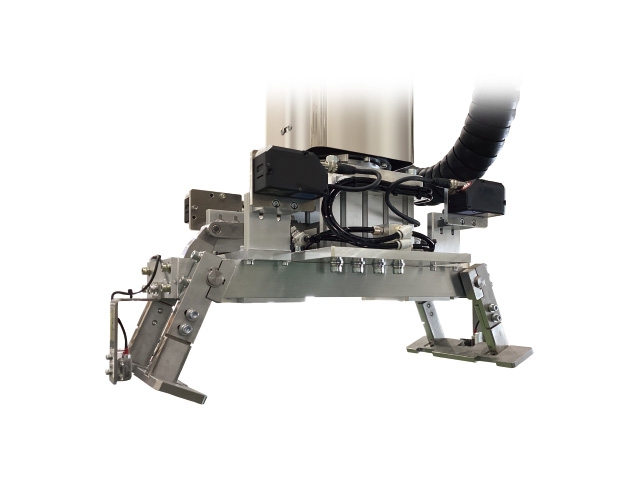
● コンテナ専用方式
コンテナボックスやオリコン、番重などの定形
「自社にはどれが合うか」
プロが無料で診断します。
現場の写真や製品のサイズをご共有いただければ、最適な機種とレイアウト図面を作成いたします。